
企業名稱:重慶卓工科技有限公司
電話:023-70647999
手機:189-9689-6686
郵箱:534200258@qq.com
網址:55centralparkwest.com
地址:重慶市豐都縣水天坪工業園區紅花巖路105號
氣動助力機械手是自動化生產過程中發展起來的一種新的裝置,目前被廣泛的應用到自動生產線中,實現了機械化和自動化的有機結合。
目前,共有三種運動方式的機械手供大家選擇,在這里給大家介紹下:
1、直移型
這種運動形式的機械手其臂部只具有沿三個直角坐標作直線移動的活動度,即臂部僅僅作彈性升降和平移等運動,它的運動規模的圖形可以以一條直線一個矩形平面或一個長方體。這種形式的機械手布局簡略,運動直觀性強,便于完成要求,但其占有的空間方位大,相應的工作規模較小。
2、屈伸型
這種運動形式的機械手,臂部有大臂和小臂兩部分,除了大臂具有水平反轉和俯仰活動度外,小臂相對大臂還有一俯仰運動。從形態上看,小臂相對大臂作屈伸運動,根據此特征稱之為屈伸型,它的運動規模圖形為球體。
3、俯仰型
這種運動形式的機械手其臂部除了具有水平反轉這個活動度外,還具有臂部俯仰這一活動度,這兩個活動度與臂部彈性活動度構成一個完好的俯仰型機械手,它的運動規模圖形為一空心圓球特征運動為俯仰,為便利起見稱俯仰型。通常將只具有臂部俯仰而無臂部反轉活動度的機械手稱為俯仰型,因為其布局與俯仰型接近。
碼垛機的未來發展
碼垛機的故障率極低。在糧油加工廠,碼垛機被用于粕庫堆包和油瓶箱堆包及上車等工序。碼垛機在正常運行時,進包、轉包、排包、推包、編碼、卸包、空托盤輸人、承載托盤輸出等工序均按設定的程序進行,并有顯示信號,操作人員僅做監護即可。
由于采用了旋轉機構、雙向開啟的卸包臺及自動對中等機構,垛層編碼合理、包裝袋封口朝里,使垛形四周整齊,具有較高的碼垛質量。
碼垛機替代人力勞動,節省碼垛成本和管理成本,使倉庫堆包現場井然有序,改善了勞動環境,提升了企業形象。
但是,碼垛機還需要不斷改進,如紙箱、包裝袋或單位級別產品的組織性能還需進一步改進。目前的配送和供給鏈越來越復雜,速度越來越快,碼垛機面臨的挑戰主要在產品處理和配送的新方法方面。
工業機器人目前得到廣泛應用,助力機械臂是智能輔助設備的其中之一,可與操作者實現人機配合作業的功能性強的作業機器人,現主要用在裝配生產線、物流傳送作業等。
助力機械臂可實現輕松搬運,達到無重力操作的效果,輕松完成物料的搬運、裝配和定位工作,現已是大型物料搬運行業的輔助裝備。助力機械臂還能達到定位的效果,當助力臂懸掛載荷后可在空中處于“浮動”狀態,實現物料的快速定位。助力臂操作簡單,它的特點是不需要控制按鈕,機械設備簡單,操作者的動作就是助力臂的動作指令。并搭配不同的夾具,提升不同產品。助力臂的安全性也是它成為主流機器人的原因之一,它充分表達了人機合作的概念,減少了錯誤操作,提高安全保障和工作效率。
助力機械臂的控制系統采用分散控制方式,上位機采用高性能單片機做為控制重點,主要工作是接受處理下位機信號并控制驅動提升系統;而下位機采用高性能單片機為控制中心,主要任務是接受處理末端操作信號并傳遞給上位機。上位機與下位機通過RS232串口通訊方式相連。提升系統總體控制方案簡單。助力臂的提升系統采用微操作力控制方式,控制原理是利用末端操作器檢測操作者的動作,并及時響應操作者的上下動作。
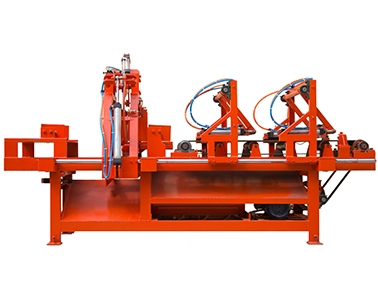
碼垛機的主要結構
機器人碼垛機主要由機械主體、伺服驅動系統、手臂機構、末端執行器(抓手)、末端執行器調節機構以及檢測機構組成,按不同的物料包裝、堆垛順序、層數等要求進行參數設置,實現不同類型包裝物料的碼垛作業。按功能劃分為進袋、轉向、排袋、編組、抓袋碼垛、托盤庫、托盤輸送以及相應的控制系統等機構。
(1)進袋機構。采用皮帶輸送機完成碼垛機供袋任務。
(2)轉向機構。按設定程序對包裝袋作轉向編排。
(3)排袋機構。采用皮帶輸送機將編排好的包裝袋送至積袋機構。
(4)積袋機構。采用皮帶輸送機集中編排好的包裝袋。
(5)抓袋碼垛機構。采用機器人碼垛機構完成碼垛作業。
(6)托盤庫。成疊的托盤由叉車送人,按程序逐個排放至托盤輥道輸送機,有規律地向碼垛工序供應空托盤,達到8層后的成垛托盤,由輥道輸送機輸送至成垛托盤庫,后由叉車取出送至倉庫貯存,系統采用可編程序控制器(PLC)控制。
手機號碼:189-9689-6686
座機號碼:023-70647999
地址:重慶市豐都縣水天坪工業園區紅花巖路105號
 |  |
| 進入網站手機站 | 掃一掃,微信咨詢 |