
企業名稱:重慶卓工科技有限公司
電話:023-70647999
手機:189-9689-6686
郵箱:534200258@qq.com
網址:55centralparkwest.com
地址:重慶市豐都縣水天坪工業園區紅花巖路105號
助力機械手是一種能自動控制并可以改變新的編程的多功能機器,他有多個自由度,可以攜帶物品在不同的環境中完成工作。尤其在高溫、高壓、灰塵、噪音情況下應用更廣泛。那么功能這么強大的助力機械手在設計時應注意什么呢?
1、結構自由是起先考慮的問題,也是工作空間范圍的問題,目前市場上銷售的2—6自由度的機械手,當然一般需要三個多自由度可以稱為助力機械手,3或3以下的一般稱為坐標機器人。除了自由度是一個重要的精度和剛度(后者是非常重要的在多自由度機械手中),前者是加工精度有關,后者與工作負載的大小和速度有關。
2、驅動系統:如果是中小工作負載和高速度,建議選擇全電動驅動器或電力驅動的。
3、當前的工業機器人的發展趨勢有高精化、高速、多軸、輕量級之分。定位精度能滿足微米和亞微米級的要求,運行速度可達3m/s,生產產品的六軸,負載2公斤的產品系統現在總重量100公斤。因此定位要準!
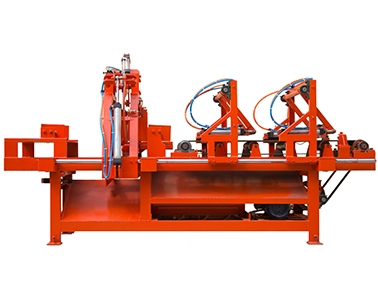
碼垛機是用在工業生產過程中執行大批量工件、包裝件的獲取、搬運、碼垛、拆垛等任務的一類工業機器人,是集機械、電子、信息、智能技術、計算機科學等學科于一體的高新機電產品。
我國工業機器人研究和應用開始于 20 世紀 70 年代,受當時經濟體制等因素的制約,發展比較緩慢,研究和應用水平比較低。進入20世紀80年代以后,隨著改革開放的不斷深入,我國工業機器人技術的開發和研究才達到一定水平,碼垛機技術也得到了快速的發展。
目前,我國自主研發的碼垛機的結構形式主要有直角坐標型、關節型。直角坐標型碼垛機為4軸機器人。4根運動軸對應直角坐標系中的X軸、Y軸和Z軸,以及Z軸上帶有的一個旋轉軸。直角坐標機器人的傳動主要是通過驅動電機的轉動帶動同步帶運動,同步帶帶動直線導軌上的滑塊運動。直角坐標機器人具有定位精度高、空間軌跡易于求解、計算機控制簡單等優點,但所占空間大、 相對工作范圍小、操作靈活性差、運動速度較低。
目前,我國生產力總體水平較低,勞動力便宜,科研人才缺乏,大多數企業的生產 自動化水平偏低,企業發展意識落后,先進碼垛設備和機器人的使用受到限制,只 在一些大型知名企業中得到了應用。
20世紀90年代中期至今,重慶,玉溪等卷煙廠采用碼垛機器人對其卷煙成品進行碼垛作業,節省了大量人力,減少了煙箱破損。碼垛機器人配備條碼識別器可以實現2種以上品牌產品的碼垛;利用真空吸盤可以實現成品拆垛;利用圖像識別系統和多功能機械手,實現了各種輔料托盤的識別和抓取,完成卷煙輔料的搭配作業。
制米工廠利用4自由度圓柱形機器人,將自動立體倉庫中 5kg或10kg的米袋抓起碼放至托板上,堆放高度可達10層,機器人水平行程可到 1200mm,回轉角度大于360度。該機器人采用直流伺服電機驅動,具有控制性能優越、效率高等優點,能滿足米袋碼垛工作要求。
我國是世界大的啤酒生產和消費國家,如何降低物流系統的成本,提高效益與 服務質量,成為競爭的新焦點。采用先進的物流技術和自動化設備是獲得市場優勢的主要戰略之一。目前,重慶啤酒、燕京啤酒、廣州珠江啤酒、東莞雪花啤酒 等知名大型啤酒生產企業已經采用全自動、半自動碼拆垛設備和機器人系統,碼垛效率得到了極大提高,現在的設備基本可以完成 48000~60000 瓶/小時的碼垛要求。
助力機械手是由人工操縱的機械手,使用者手動操作機械手臂完成機械手的上下運動和回轉運動等動作,并通過操作氣動開關實現夾具的夾持,從而進行工件的搬運、移栽、裝配等作業。助力機械手的使用可以減輕操作人員的勞動強度,實現搬運大質量工件時操作輕便和定位準確,那么能量這么大的助力機械手操作的時候有哪些注意事項呢?下面就由來為大家講解下:
1、系統通氣前,要先檢查一下各個操作開關的方向是否正確,機械手應遠離設備和人員,避免手臂突然翹起造成人員受傷等事故;
2、機械手不使用時,要檢查各個按鈕是否都恢復到“關閉”狀態;
3、起吊重量不得超過的起吊量;
4、不得將手、腳及身體的任何部位伸到吊物下面;
5、不得將手或手指伸入機械臂的間隙;
6、操作中臉和手不得伸入機械臂的頂端或配件上部;
7、在沒有確認工件是否夾緊前,不得帶載操作機械手,以免工件滑落;
8、不得采用使得重物偏位、潰散的操作方法,即操作中不得劇烈晃動機械手臂;
9、操作人員工作時任何人不得進入作業現場;
10、操作人員離開作業現場時,應將機械手放置到空閑位置,機械手夾具放到很低。
碼垛機主要是用于捆扎貨物,它的效率極高,通常一臺碼垛機捆扎一次僅需1.5~3秒,然而一旦發生故障就不能無法正常工作,對于生產影響甚大,雖然碼垛機出故障是無法避免,但是只要我們在操作時嚴格規范就可以減少故障的發生。這里和大家分享下碼垛機在操作時有哪些注意事項。
一,安裝構件時要嚴格按照說明書。為了防止出現卷帶松散的情況,在裝帶之前不要將包裝紙和繩拆開來,在放入帶盤固定事后再進行拆除。
二,預熱設備,裝帶及穿帶操作完成之后,打開打包機前面板上的電源開關,幾秒預熱后,燙頭溫度達到工作要求,即可開始打包工作。
碼垛機
三,溫度調節按鈕的熟知。打包機的打包溫度不足要調整“溫度控制器”,右旋可以使燙頭的溫度升高,左旋可以使溫度降低。
四,捆扎頻率的控制。按照需要打包的物體大小來調整前面板上的“送帶長度調節器”。每格表示送帶時間,以秒為單位。不要將其置于0,會導致送不出帶子。
五,必要時可以手動進行操作,在打包的時候,出現打包帶送出長度不足,可以按“手動出帶”按鈕來任意送帶。
另外,自動碼垛機為了安全起見,也設置了緊急自動停止裝置,當然也是可以控制停止的時間,因為設備運行時難免會有突發狀況出現,所以,安全性很重要。
手機號碼:189-9689-6686
座機號碼:023-70647999
地址:重慶市豐都縣水天坪工業園區紅花巖路105號
 |  |
| 進入網站手機站 | 掃一掃,微信咨詢 |